3D Point-Cloud Generation from Stereo Imagery
Anonym
One of the most exciting new software technologies we will release this summer in concert with ENVI 5.3 is the ability to generate 3D point-clouds using stereo optical imagery from some of the more popular commercial spaceborne platforms (e.g. WorldView-3 and Pléiades-1). This functionality will be a new component of the upcoming ENVI Photogrammetry Module that will produce LAS format output files that can be used with ENVI's wide variety of point-cloud visualization & processing tools including raster DSM creation, 3D feature extraction and line-of-sight analysis.
This software technology generates 3D point-clouds from spaceborne EO/IR imaging platforms via multi-ray photogrammetry techniques that involve feature detector pixel correlation and dense image matching. This will allow users to take advantage of existing large commercial imagery archives to generate 3D point-clouds and create terrain products in regions where flying airborne LiDAR collections are not feasible or are cost prohibitive.
One of the testing datasets we are utilizing as we develop this software technology is the "Pléiades TRISTEREO" sample dataset available on the Airbus Defence & Space - Sample Imagery website. This tri-stereo dataset is located in Melbourne, Australia and below is a screenshot of an image subset with the Flemington Racecourse:

Image data courtesy of Airbus Defence and Space
From the three input Pléiades-1 images the rational polynomial coefficient (RPC) metadata is used along with a block adjustment process to generate a 3D point-cloud. Below is a screenshot of the derived point-cloud colored by height and shaded by intensity from the input imagery loaded into the ENVI software:
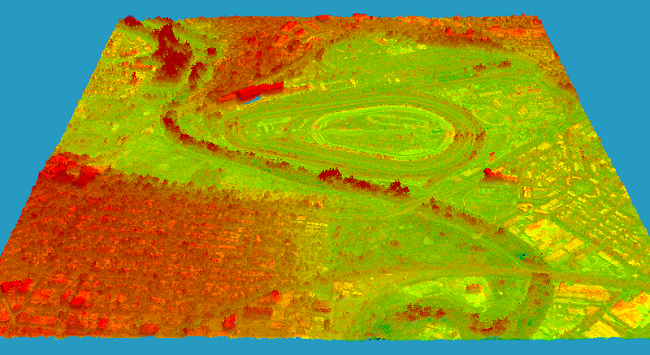
3D point-cloud generated by ENVI Photogrammetry Module