Cloud-Based Feature Extraction and the Growing LiDAR Industry
Anonym
According to a recent study1,the LiDAR industry is expected to grow to over $550 million dollars by the end of 2018. LiDAR is currently used to solve some of the most unique problems in the world today such as off-shore wind assessment for power production, the development of Advanced Driver Assistance Systems (self-driving cars), advanced agricultural assessment and monitoring, and urban development.
The GIS industry as a whole has also seen an increase in the use of cloud-deployed visualization and exploitation environments that allow users to discover, view, and extract information from large geospatial datasets by leveraging the power of server technology and web standards. The combination of advanced LiDAR analysis techniques and the data dissemination and big data capabilities afforded by cloud computing will expand the industry's ability to solve new and existing problems across a myriad of different vertical markets.
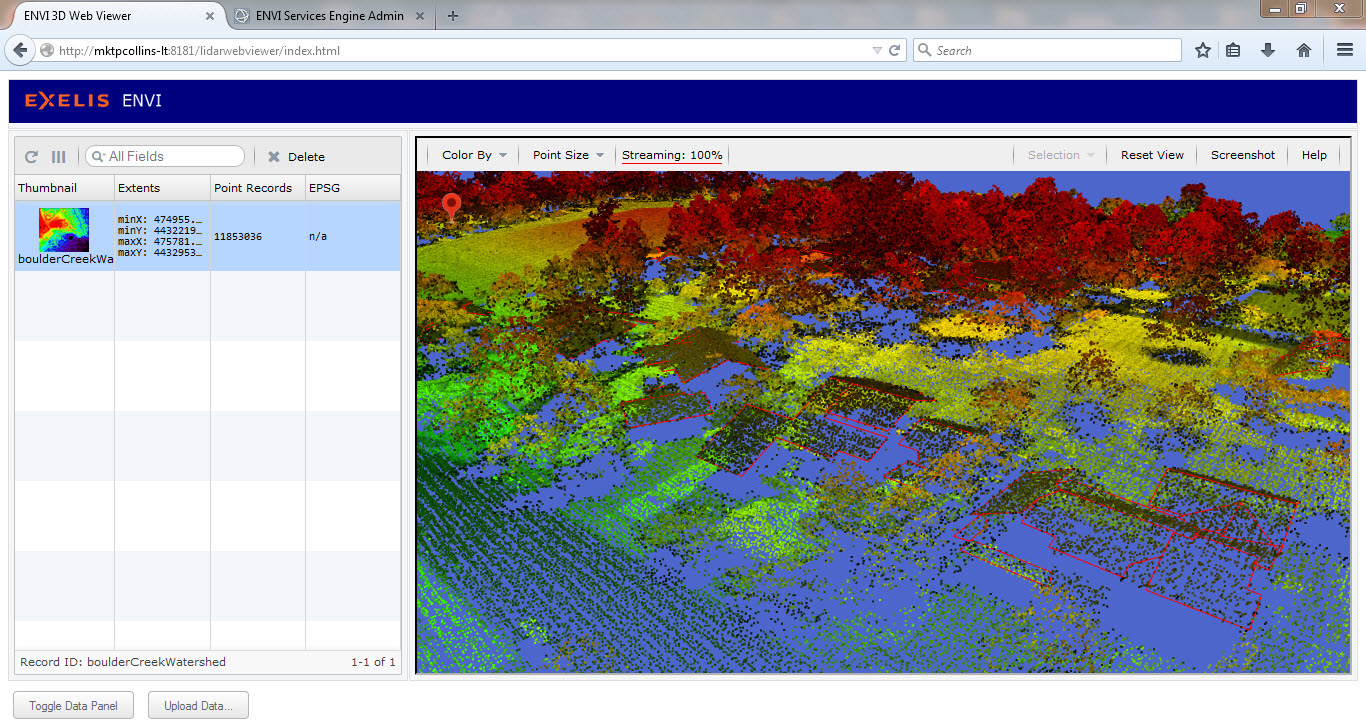
What we've done at Exelis is to enable the streaming and analysis of LiDAR point clouds using server technology and a web-based browser. Hosted in the ENVI Services Engine, the LiDAR streamer and 3D Web Viewer allow users to upload and stream large LiDAR point clouds at interactive frame rates and to automatically extract building vectors by leveraging the ENVI LiDAR API in a server environment.
LiDAR provides unique challenges to traditional web-GIS, including both the large size of the data and the three-dimensional environment required to visualize it. Another challenge is the pre-processing work that needs to be done to the LiDAR to get it ready for streaming and consumption via the viewer. In order to compensate for the extremely large size of most LiDAR point clouds, they must be broken into smaller subsets that can be streamed, when needed, into the viewer. This is similar to the way that tiled map services decrease bandwidth requirements by only serving up the tiles that are requested by the application. The breaking up of the point cloud is carried out by an ENVI Services Engine task which bins the data into a quadtree structure and makes it available for streaming by the engine. This allows for fast spatial queries against the data and provides the different levels of detail needed to display the data at different scales.
The viewer was built using JavaScript / WebGL technology. This technology was chosen for a number of benefits it brings to both the developer and the user. Use of the quadtree structure and 3D Web Viewer not only make visualization possible, it helps make it easier for the end-user. Eliminating the need to download client side software or libraries increases the number of people who can successfully access the functionality. Also, fast spatial queries combined with application 'smarts' that only load high resolution details in the area where the user is looking make for a smoother overall experience without detracting from the ability to fully exploit the data.
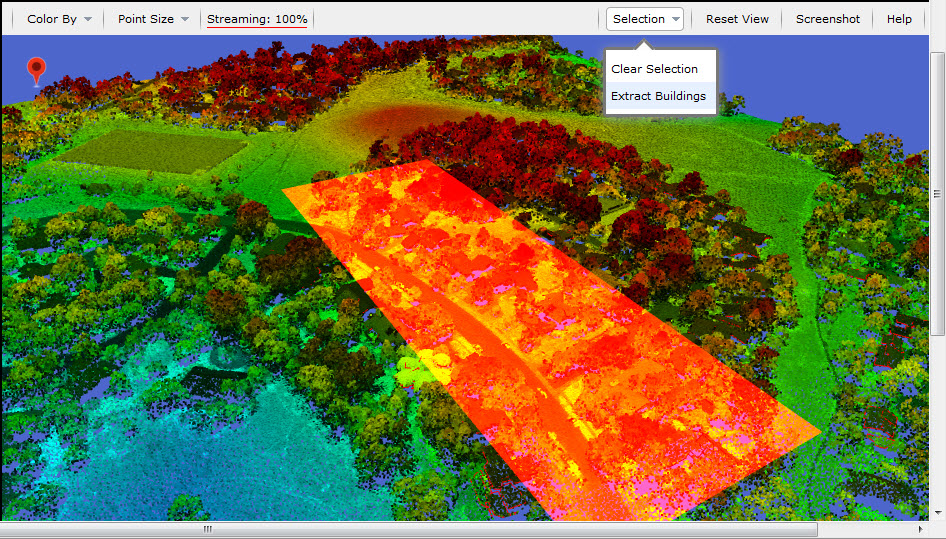
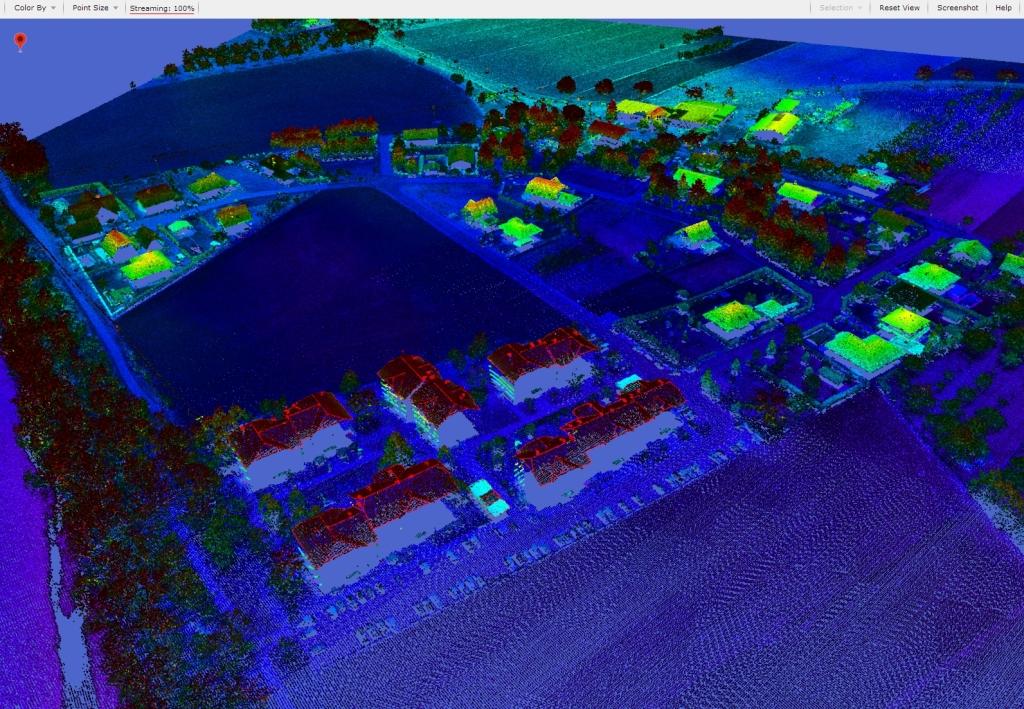
The 3D Web Viewer not only enables the consumption of streaming point clouds, it also contains the functionality necessary to send http://RESTcalls back to the server to kick-off LiDAR processing. In this case, we've enabled the ENVI LiDAR automated building extraction API method as a task in the Services Engine. The user can indicate a rectangle within the viewer that encompasses points that they want to extract buildings from. Clicking on Selection -> Extract Buildings passes the coordinates of the rectangle back to the engine as part of the REST call along with the dataset to analyze and the analysis to run on it. Once the feature extraction algorithm has finished, the resulting shapefiles are written out to a specified directory and subsequently streamed from the server for display in the 3D Web Viewer.
Building extraction is one of numerous automated tasks enabled through the API, which includes algorithms for extracting elevation and terrain models, power lines, trees, contours, and more. The code is also customizable so that advanced users can develop code to extract pretty much any feature they want from the point cloud. All of these algorithms can then be loaded into the engine and enabled as an http:// REST endpoint for execution from a web-based resource such as the 3D Web Viewer.
The LiDAR API, combined with the customization potential of the Interactive Data Language (IDL), make the development of custom extraction tasks a reality, allowing businesses to develop problem-specific LiDAR solutions and enable them in a web environment. This is the type of customizable technology that will help raise the industry to new heights in the coming years, driven by the innovative businesses that leverage the amazing amount of information contained within the point cloud.
Sources:
1.) LiDAR Market by Components (INS, Laser, GPS/GNSS, Camera, MEMS), Product Types (Airborne, Mobile, Terrestrial), Applications (Corridor Mapping, Forestry, Mining,Topographic Surveying, Volumetric Mapping) - Global Forecasts and Analysis 2013– 2018