The LEAST_SQUARES_FILTER function reduces degradation and noise in an image based on the mean and variance of the degradation and noise. This is also known as a constrained least squares filter.
If the degraded image is modeled in the spatial domain by

the constrained least squares filter seeks to find the minimum of

subject to the constraint

The solution to this problem is given by the following equation:

where H(u,v) is the degradation function and

is the complex conjugate of the degradation function. P(u,v) is the Laplacian operator frequency domain, and γ is a parameter which is set to meet the previously-mentioned constraint. G(u,v) is the frequency domain of the observed image, and

is the frequency domain estimate of the undegraded image.
This routine is written in the IDL language. Its source code can be found in the file least_squares_filter.pro in the lib subdirectory of the IDL distribution.
Examples
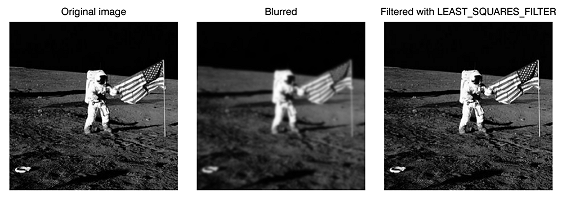
In the following example, we introduce some degradation to an image and then filter it with LEAST_SQUARES_FILTER.
file = FILEPATH('moon_landing.png', SUBDIR=['examples','data'])
astronaut = READ_PNG_png(file)
image_size = SIZE(astronaut, /DIMENSIONS)
x_coords = LINDGEN(image_size) mod image_size[0] - image_size[0]/2 + 1
y_coords = TRANSPOSE(x_coords)
k = 0.0025
degradation = EXP(-k * (x_coords^2 + y_coords^2 ) ^ (5d/6d) )
blurred = degradation*FFT(astronaut, /CENTER)
blurred = REAL_PART(FFT(blurred, /INVERSE, /CENTER))
filtered = LEAST_SQUARES_FILTER(blurred, degradation, 10d^(-18.22))
g0 = IMAGE(astronaut, LAYOUT=[3,1,1], DIMENSIONS=[3,1]*image_size, $
TITLE='Original image')
g1 = IMAGE(blurred, LAYOUT=[3,1,2], /CURRENT, $
TITLE='Blurred')
g2 = IMAGE(filtered, LAYOUT=[3,1,3], /CURRENT, $
TITLE='Filtered with LEAST_SQUARES_FILTER')
Syntax
Result = LEAST_SQUARES_FILTER( ImageData, DegradationFunction, Gamma )
Return Value
Returns a double-precision floating-point array of the same dimensions as ImageData.
Arguments
ImageData
A two-dimensional array containing the pixel values of the input image.
DegradationFunction
A two-dimensional array representing the transfer function that describes the image degradation.
Degraded images are modeled as the product of the true image with a degradation function and the addition of noise, represented by G(u,v) = H(u,v)F(u,v) + N(u,v). G(u,v) is the observed image in the frequency domain, H(u,v) is the degradation function, F(u,v) is the true image in the frequency domain, and N(u,v) is the noise function in the frequency domain.
Gamma
A scalar with a value chosen to meet the constrained least squares criterion.
Keywords
None
Version History
See Also
MEAN_FILTER, ESTIMATOR_FILTER, BANDPASS_FILTER, BANDREJECT_FILTER, WIENER_FILTER